「大気圏突破」「全ての人に夢と感動を与える」を団体理念とし、宇宙に関する様々な活動を展開している学友会準加盟団体のFROM THE EARTH(以下、F.T.E.)は、ハイブリッドロケットの開発・打上や小型模擬人工衛星CanSatの開発・走行実験を行っています。
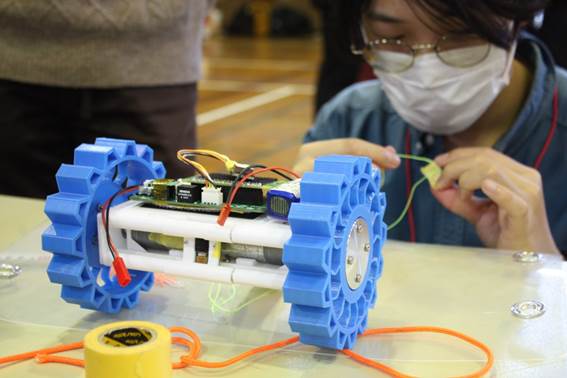
CanSat(缶サイズの人工衛星|Can Satelite)の開発では、GPSやカメラを駆使してゴール地点まで自律して走行するローバーを製作しています。
この度CanSatプロジェクトの活動の一環として、F.T.E.で3チーム(内1チームはロケット部門で参加)が3月4日から3月9日にかけて開催された「種子島ロケットコンテスト2026」に参加し、全国から37チームが出場したCanSat部門自律制御カムバック競技において、学部3年生チームであるTEAM Xが準優勝を獲得しました。落下衝撃に耐えられる耐久性に優れた構造とゴールまで最短経路で精密に誘導する高度なゴール検知アルゴリズムを搭載し、機体の完成度が高かったF.T.E.のチームは、見事にゴールまで辿り着くことができました。
機体開発を主導したチームメンバーの田中 大翔さんから、「私たちがチームを結成してから2年半、ようやくこのように実を結ぶことができました。試行錯誤を繰り返しながら辿り着いたこの機体が本大会で団体内初ゴールという快挙を成し遂げたことをチーム一同嬉しく感じております。」と授賞コメントがありました。
本学は、学生の課外活動を推進しています。引き続き、F.T.E.への応援をよろしくお願いします。
準優勝チーム(TEAM X)メンバー
・田中 大翔さん(工学部3年)
・佐藤 空馬さん(理学部3年)
・佐貫 眞人さん(工学部3年)
・黒岩 亮太さん(工学部3年)
・狩俣 空さん(工学部3年)
※学年は大会当時
自律制御カムバック競技とは
クレーンで30mの高さから機体を投下し、遠隔操作なしの自律制御のみでゴールの赤コーンを目指す競技です。パラシュートを用いて減速落下し、その後地上走行でゴールへ向かう方法が主流です。今回のTEAM Xもこの手段を取っています。搭載したセンサーなどの情報から現在位置とゴールへの方向を見つけ出し、ゴールへ向けて走行。最終的にはゴールコーンを見つけ、最終誘導を行うという操作を機体が一貫して自動で行います。今大会では37チームのうち3チームがゴールに到達しました。
種子島ロケットコンテスト
手作りによるモデルロケットや衛星機能モデルを開発・製作し打上げることで、物作りの奥深さ・面白さを体験することを通して、我が国の宇宙開発利用に向けた人材育成を行うとともに、宇宙開発利用の普及啓発や地域の活性化を目的とした種子島ロケットコンテスト大会実行委員会主催のコンテストです。



ご支援を心よりお願い申し上げます
皆様の多大なるご支援により、多くの学友会所属団体が個人または団体で世界大会、全国大会、コンクールで優秀な成績を勝ち取ったり、社会貢献活動やボランティア活動の実施により成果を上げたりと、様々な目標を達成しております。
今後も、学生たちが世界へ、そして次の一歩へ踏み出すための温かいご支援をどうぞよろしくお願いします!